概要
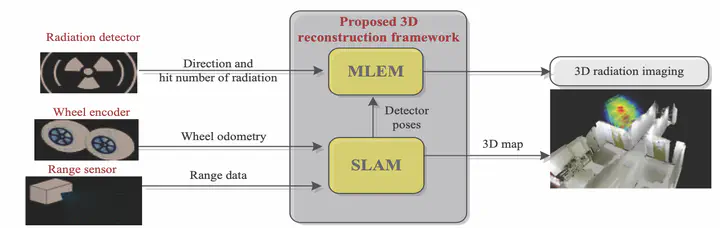
This paper presents a novel scheme for the three-dimensional (3D) reconstruction of radiation source distribution by using multiple viewpoint of detector. Detecting and localizing radiation source are required for nuclear safety, security, and surveillance when considering exposure to radiation. In such cases, 3D reconstructed information would greatly contribute to a better understanding of the spatial relation between radiation sources and a surrounding environment. Considering contamination of radiation for human, we used a mobile robot equipped with a detector because it is suitable to measure a radiation in multiple viewpoint. We assume that trajectory of the mobile robot with the detector (i.e., pose of the detector) is estimated by simultaneous localization and mapping (SLAM) scheme. Therefore, 3D radiation source distribution can be reconstructed by utilizing maximum likelihood expectation maximization (MLEM) method, which performs optimization based on all measured data and estimated detector poses. The result of the simulation experiment demonstrated that the proposed framework can accurately perform 3D reconstruction of radiation image in the indoor environment.