研究内容
Overview
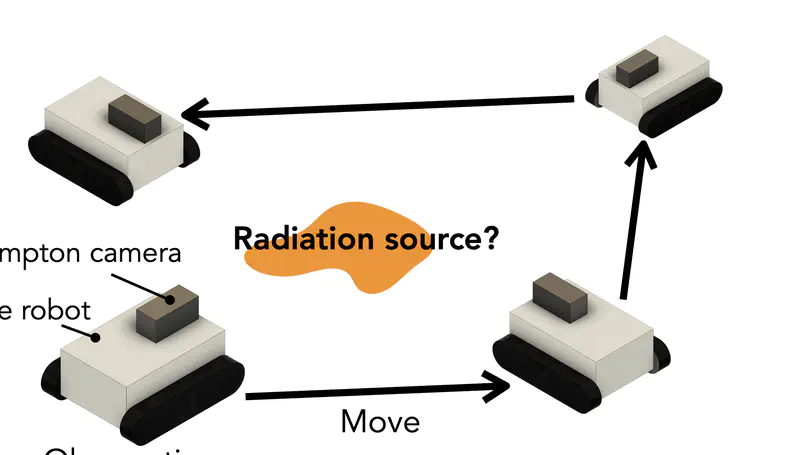
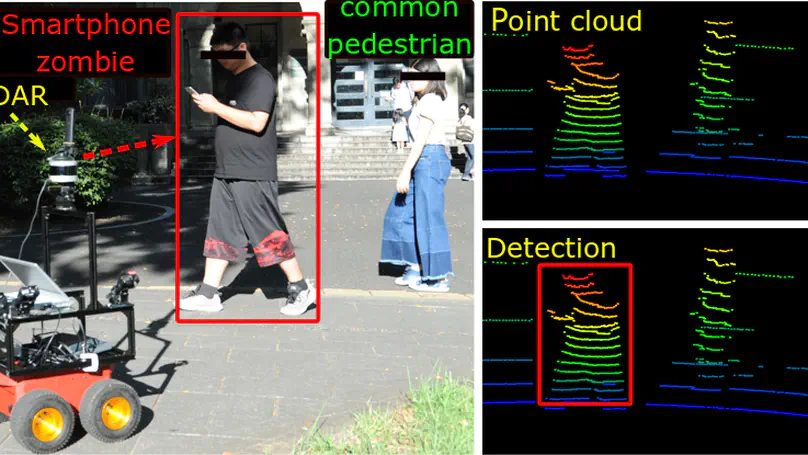
ロボットをはじめとする新たな人工物が人間社会の中で機能するためには、共存相手となる他者、つまり人間の理解が必要不可欠です。これは単に機械の側から見える他者の動きを捉えれば良いのではなく、他者が状況をどのように捉えているのかを理解する必要があるということを意味しています。この理解のために、当研究室では人間の振る舞いに内在する意図や注意を考慮したロボティクスについての研究を行っています。また、当研究室では、放射線のような人間の目には見えない対象を計測・可視化し、その線源を特定するためのロボティクス技術についての研究も行っています。このように、当研究室では、さまざまな研究分野との融合を通じて、目に見えないものを可視化し、さらには制御するための研究を行っています。