TAMURA Lab
TAMURA Lab
研究室
News
メンバー
研究内容
研究業績
受賞
講義
アクセス
歩行者
移動ロボットのための不確実性を考慮した歩行者の移動予測に関する研究
川住 歩弥
歩行者が車両に道を譲る可能性の推定と軌道予測への利用
歩行者が車両に道を譲る可能性の推定と軌道予測への利用(第28回ロボティクスシンポジア) by @tamlab
丹野 壮一郎
,
田村 雄介
,
平田 泰久
Towards safe and smooth coexistence of mobile robots and inattentive humans
Towards safe and smooth coexistence of mobile robots and inattentive humans (PNARUDE Workshop at IROS2022) by @tamlab
田村 雄介
Monte Carlo Dropout法による不確実性を考慮した歩行者の移動予測
RSJ2022_kawasumi
川住 歩弥
,
田村 雄介
,
平田 泰久
歩行者と車の相互作用を考慮するアテンションモデルによる軌道予測
丹野 壮一郎
,
田村 雄介
,
大室 朗
,
岩本 太郎
,
菅野 崇
,
平田 泰久
歩行者と車の相互作用を考慮したアテンションモデルによる軌道予測に関する研究
丹野 壮一郎
交通参加者の移動予測
人とロボット、自動運転車などの安全な共存のために、歩行者や電動キックボードなどの移動予測に関する研究をおこなっています。
川住 歩弥
,
丹野 壮一郎
,
只野 竣也
,
Hendrikus Hansen Witarsa
,
長沼 優輝
,
三井 貴裕
,
田村 雄介
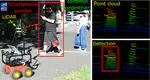
歩きスマホの検出
LiDARやカメラを用いて歩きスマホを検出する手法を研究しています。
川住 歩弥
,
只野 竣也
,
田村 雄介
人とロボットの安全な共存のためのカメラ映像を用いた歩きスマホ検出
人とロボットの安全な共存のためのカメラ映像を用いた歩きスマホ検出(SI2021)
川住 歩弥
,
田村 雄介
,
平田 泰久
人とロボットの安全な共存のためのカメラ映像を用いた歩きスマホ検出に関する研究
川住 歩弥
«
»
引用
×