概要
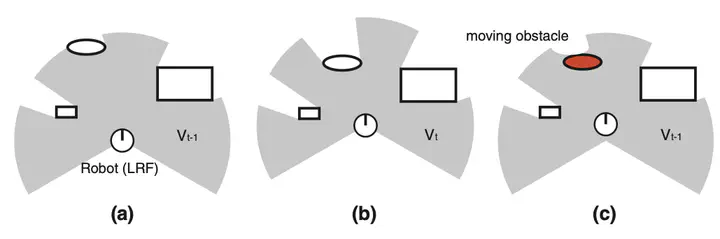
For service robots coexisting with humans, both safety and working efficiency are very important. In order for robots to avoid collisions with surrounding obstacles, the robots must recognize obstacles around them. In dynamic environments, not only currently moving obstacles but also movable obstacles should be recognized. In this paper, three types of obstacles, such as stationary, movable and moving, are defined, and a method to identify the type of obstacles is proposed. The experiments using a mobile robot were conducted to evaluate the usefulness of the method.
収録
Intelligent Service Robotics, 4 (2), pp.99-105