誰もが安全に好きなように買い物ができるようにするため、商業施設等の複雑な環境で安全な移動を支援するためのショッピングカート型ロボットの開発を行っています。
人間とロボットが円滑にインタラクションするために必要な人間の視覚的注意のモデル化を行っています。
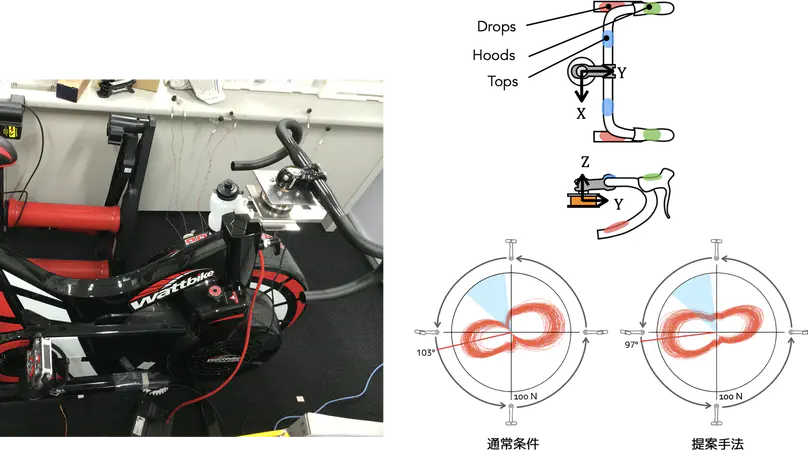
自転車競技を題材として技能の解析やスキル向上支援についての研究を行っています。
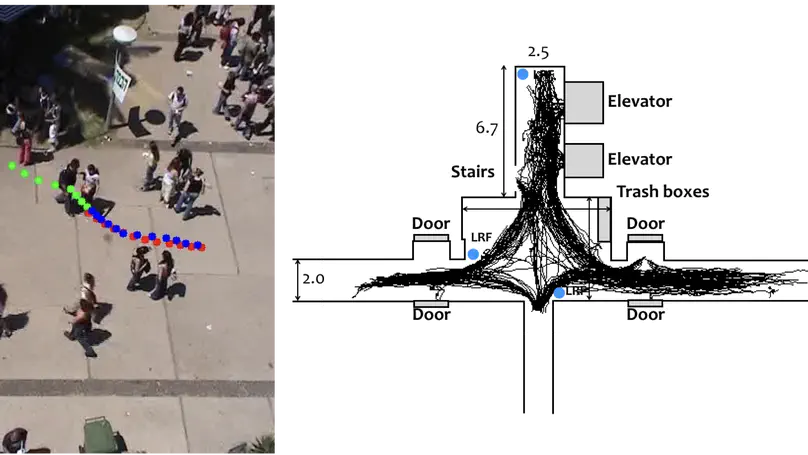
人とロボット、自動運転車などの安全な共存のために、歩行者の移動予測に関する研究をおこなっています。
パーソナルモビリティの操作支援システムの研究をしています。
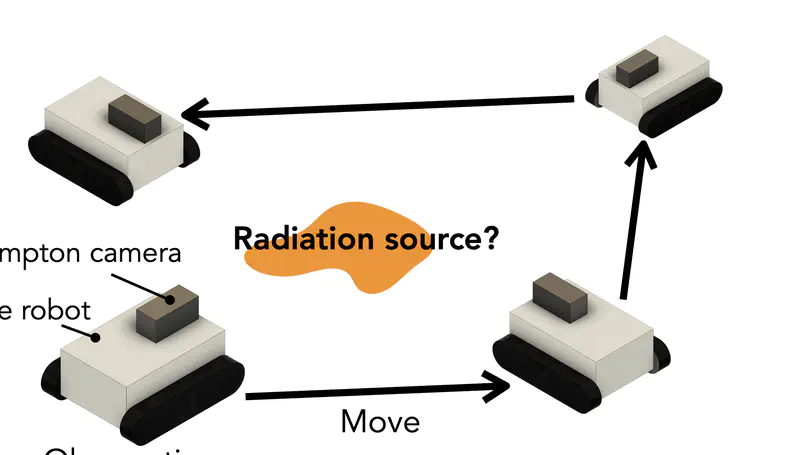
移動ロボットを用いて放射線源の分布を推定する研究をしています。
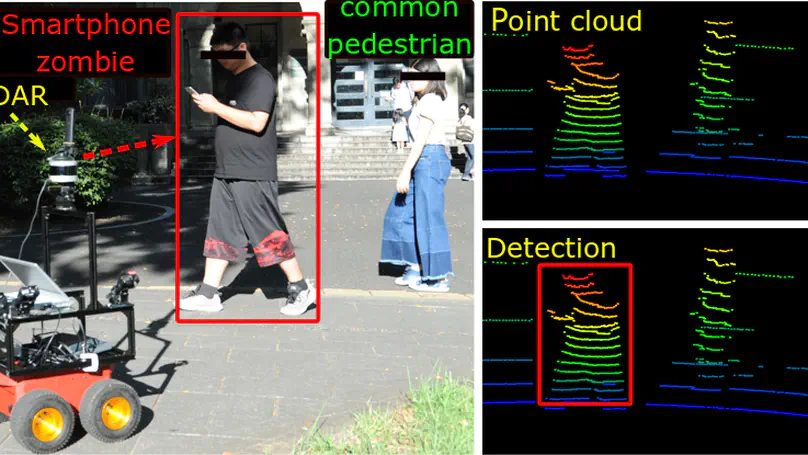
LiDARやカメラを用いて歩きスマホを検出する手法を研究しています。