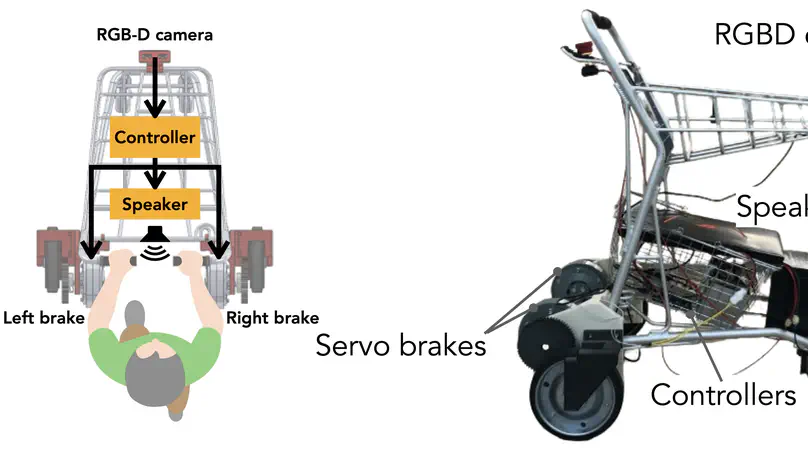
To enable everyone to shop safely and freely as they wish, we are developing a shopping cart-type robot to assist safe movement in complex environments such as commercial facilities.
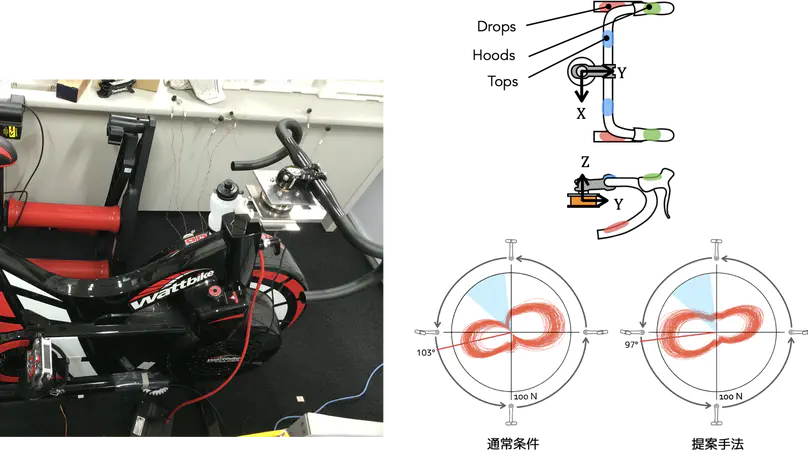
We are conducting research on skill analysis and skill improvement support for cycling.
We are developing a model of human visual attention for smooth human-robot intereaction.
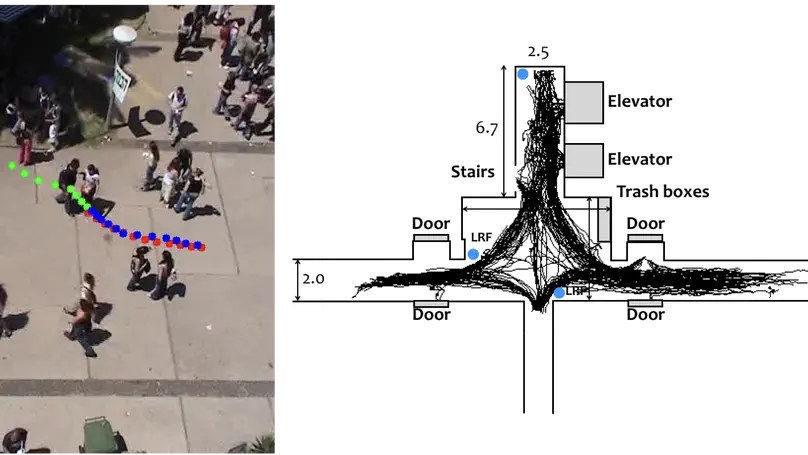
We are conducting research on behavior prediction of traffic participants for the safe coexisting of humans, robots, and autonomous vehicles.
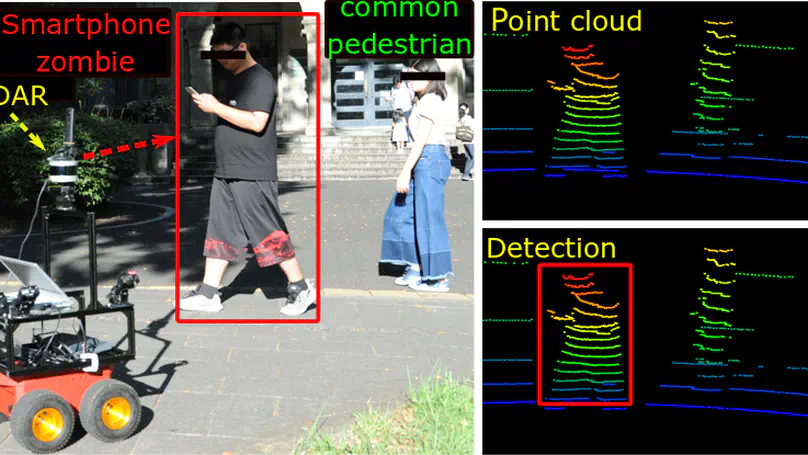
We are developing methods to detect smartphone zombies by using a LiDAR and a camera.
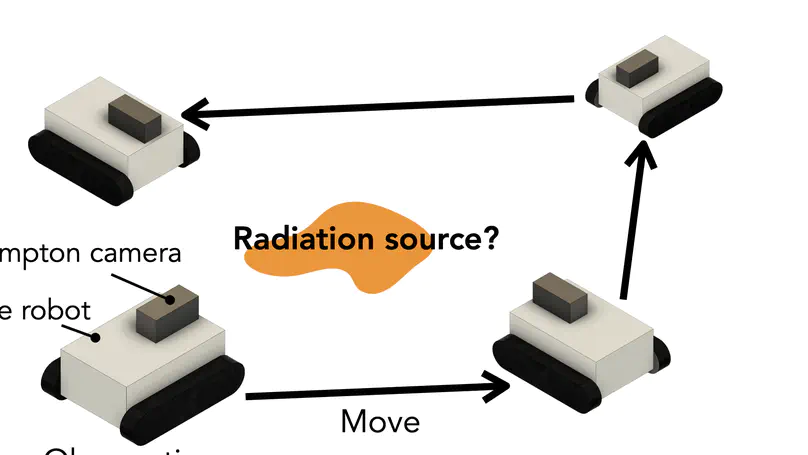
We are studying methods to estimate radiation sources by using mobile robots.
We are studying a method on operation support for personal mobilities