Abstract
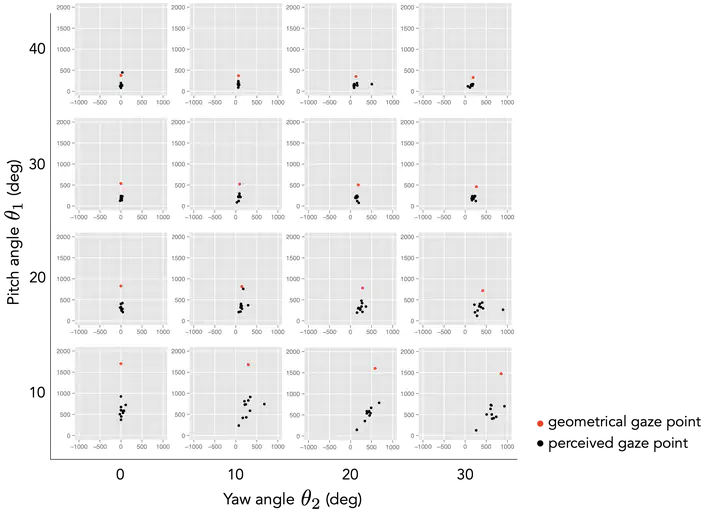
For a robot to smoothly interact with humans, it has to possess the capability to manipulate human attention to a certain degree. In this study, we start with a hypothesis that humans cannot correctly perceive what a robot is looking at. To examine the hypothesis, an experiment, which focuses on the relationship between a robot’s geometrical gaze point and the gaze point perceived by a human, was conducted. The results of the experiment supported the hypothesis. Based on the results, we propose a computational model that calculates where robots are to look in order to guide human’s attention to the desired area. The validity of the proposed model was demonstrated by cross validation.
Type
Publication
Journal of Advanced Computational Intelligence and Intelligent Informatics, 21 (4)