TAMURA Lab
TAMURA Lab
研究室
News
メンバー
研究内容
研究業績
受賞
講義
アクセス
移動ロボット
歩きスマホ歩行者の注意状態を考慮した自律移動ロボットの動的なコストマップ調整
只野 竣也
,
田村 雄介
,
平田 泰久
歩行者移動予測を用いた投影誘導による移動ロボットと歩行者の協調回避
歩行者移動予測を用いた投影誘導による移動ロボットと歩行者の協調回避(SI2024) by @tamlab
長沼 優輝
,
丹野 壮一郎
,
田村 雄介
,
平田 泰久
移動ロボットの歩行者フレンドリーな動作を実現するための歩行者の予測と誘導に関する研究
丹野 壮一郎
移動ロボットが選択する将来の軌道が歩行者に与える影響を考慮した歩行者軌道予測
丹野 壮一郎
,
田村 雄介
,
平田 泰久
移動ロボットのための不確実性を考慮した歩行者の移動予測に関する研究
川住 歩弥
パーソナルモビリティの操作支援
パーソナルモビリティの操作支援システムの研究をしています。
岡本 章良
,
Le Van Tan
,
萱場 涼太
,
田村 雄介
Path Planning for Localization of Radiation Sources Based on Principal Component Analysis
岸本 卓也
,
禹 ハンウル
,
小松 廉
,
田村 雄介
,
富田 英生
,
島添 健次
,
山下 淳
,
淺間 一
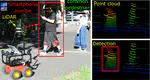
Smartphone Zombie Detection from LiDAR Point Cloud for Mobile Robot Safety
呉 家旭
,
田村 雄介
,
Yusheng Wang
,
禹 ハンウル
,
Alessandro Moro
,
山下 淳
,
淺間 一
ガンマ線検出器を搭載した移動ロボットによる空間中の構造物を考慮した放射線源分布の3次元再構成
岸本 卓也
,
禹 ハンウル
,
田村 雄介
,
島添 健次
,
高橋 浩之
,
山下 淳
,
淺間 一
Robust Path Planning against Pose Errors for Mobile Robots in Rough Terrain
土居 悠輝
,
池 勇勳
,
田村 雄介
,
池田 裕樹
,
梅村 篤志
,
金島 義治
,
村上 弘記
,
山下 淳
,
淺間 一
»
引用
×