TAMURA Lab
TAMURA Lab
研究室
News
メンバー
研究内容
研究業績
受賞
講義
アクセス
歩行者
人とロボットの安全な共存のためのカメラ映像を用いた歩きスマホ検出
人とロボットの安全な共存のためのカメラ映像を用いた歩きスマホ検出(SI2021)
川住 歩弥
,
田村 雄介
,
平田 泰久
人とロボットの安全な共存のためのカメラ映像を用いた歩きスマホ検出に関する研究
川住 歩弥
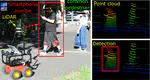
Smartphone Zombie Detection from LiDAR Point Cloud for Mobile Robot Safety
呉 家旭
,
田村 雄介
,
Yusheng Wang
,
禹 ハンウル
,
Alessandro Moro
,
山下 淳
,
淺間 一
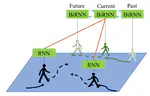
Pedestrian Trajectory Prediction Using BiRNN Encoder-Decoder Framework
呉 家旭
,
禹 ハンウル
,
田村 雄介
,
Alessandro Moro
,
Stefano Massaroli
,
山下 淳
,
淺間 一
A Human-Friendly Robot Navigation Algorithm Using the Risk-RRT Approach
Wenzheng Chi
,
河野 仁
,
田村 雄介
,
山下 淳
,
淺間 一
,
Max Q.-H. Meng
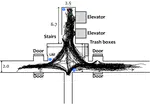
動的環境下における歩行者流を利用した移動ロボットナビゲーション
熊原 渉
,
増山 岳人
,
田村 雄介
,
山下 淳
,
淺間 一
局所経路情報と歩行者流情報を用いた移動ロボットナビゲーション手法
熊原 渉
,
増山 岳人
,
田村 雄介
,
山下 淳
,
淺間 一
環境に応じた人間の移動予測に基づく移動ロボットの人物回避
田村 雄介
,
濱崎 峻資
,
山下 淳
,
淺間 一
Modelling Behaviour Patterns of Pedesrians for Mobile Robot Trajectory Generation
田村 雄介
,
寺田 善貴
,
山下 淳
,
淺間 一
Development of Pedestrian Behavior Model Taking Account of Intention
田村 雄介
,
Phuoc Dai Le
,
人見 謙太郎
,
Naiwala P. Chandrasiri
,
坂東 誉司
,
山下 淳
,
淺間 一
«
»
引用
×