概要
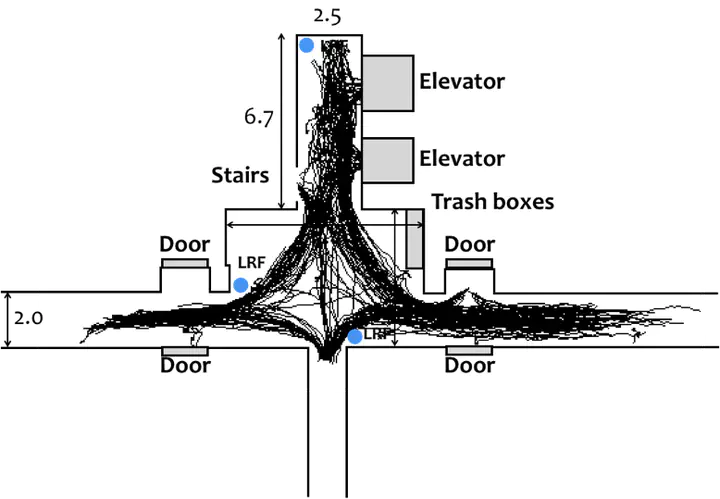
In order for mobile robots to coexist with humans, both safety and efficiency should be satisfied. We propose a method to predict pedestrian movement for collision avoidance of mobile robots and pedestrians. In the proposed method, the pedestrian trajectories are measured and a database of human movement tendencies is generated. The database is applied to the prediction of future pedestrian movement. To decrease the initial time cost for database generation, environmental geometric configuration is considered in the form of virtual forces. To verify the usefulness of the proposed method, we generated the database based on five-hour observation and conducted three types of experiments based on the generated database. The first experiment showed the prediction performance of the proposed method and proved the method guaranteed the safety. The second experiment showed that the proposed method satisfied both the safety and efficiency through the comparative simulations. The third experiment showed the method could apply to the real mobile robot.