概要
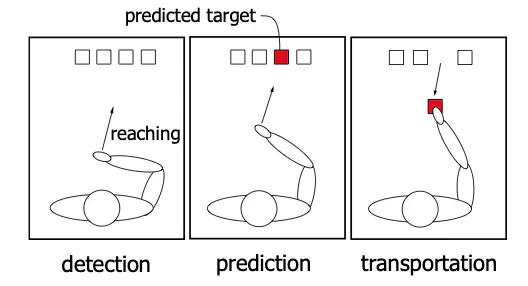
We aim to realize an intelligent robotic system that delivers necessary objects to human desk-workers in home or office environments. In order to meet this goal, we propose methods to understand a request for support of a user of the system. We adopt an approach that the system measures the user’s hand and eye movements in reaching for an object to detect and understand the request. Based on the detection and understanding of the request, the system delivers necessary objects to the user using self-moving trays. The experimental results demonstrate the advantage of the methods proposed here.
収録
Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.2840-2845