TAMURA Lab
TAMURA Lab
研究室
News
メンバー
研究内容
研究業績
受賞
講義
アクセス
日本語
English
1
多面体型指向性検出器の製作と評価
野上 光博
,
北山 佳治
,
人見 啓太朗
,
田村 雄介
,
金子 慎一郎
,
高田 英治
,
鳥居 建男
全方向コンプトンカメラによる放射性物質探知手法の開発 (9) 野外における2線源(137Cs, 60Co)の同定
富田 英生
,
神田 皆人
,
向 篤志
,
島添 健次
,
田村 雄介
,
禹 ハンウル
,
Agus Nurrachman
,
高橋 浩之
,
淺間 一
,
上ノ町 水紀
,
石田 文彦
,
高田 英治
,
河原林 順
,
土屋 兼一
,
田辺 鴻典
,
鎌田 圭
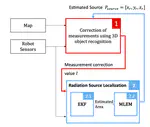
Radiation Source Localization Considering Shielding Effect of Structures Using 3D Object Recognition
Radiation Source Localization Considering Shielding Effect of Structures using 3D Object Recognition (SII2024) by @tamlab
阮 覇唯
,
田村 雄介
,
平田 泰久
Estimation of people's gaze targets by the mobile robot equipped with a 360 degree camera
涂 佳林
,
田村 雄介
,
平田 泰久
サーボブレーキを用いたショッピングカート型ロボットシステムの開発
施 展
,
田村 雄介
,
廖 振宇
,
平田 泰久
ハンドルにかかる荷重の時系列情報と骨格情報を用いた自転車屋外走行時の上半身の姿勢推定
中田 凜太朗
,
田村 雄介
,
平田 泰久
移動ロボットが選択する将来の軌道が歩行者に与える影響を考慮した歩行者軌道予測
丹野 壮一郎
,
田村 雄介
,
平田 泰久
全方向コンプトンイメージングに基づく放射線源可視化・定量法の開発 (6) 高強度線源に対する線源位置・強度推定の実証
神田 皆人
,
向 篤志
,
島添 健次
,
田村 雄介
,
禹 ハンウル
,
Agus Nurrachman
,
高橋 浩之
,
淺間 一
,
上ノ町 水紀
,
石田 文彦
,
高田 英治
,
河原林 順
,
土屋 兼一
,
田辺 鴻典
,
鎌田 圭
,
富田 英生
Demonstration of Gamma Source Finding in the Field based on Fusion Data between 4π Gamma Imaging and Simultaneous Localization and Mapping
神田 皆人
,
向 篤志
,
島添 健次
,
田村 雄介
,
禹 ハンウル
,
Zhong Zhihong
,
Agus Nurrachman
,
高橋 浩之
,
淺間 一
,
上ノ町 水紀
,
石田 文彦
,
高田 英治
,
河原林 順
,
土屋 兼一
,
田辺 鴻典
,
鎌田 圭
,
富田 英生
3次元測距と全方位ガンマイメージングを融合したγ線源可視化・定量法の開発
神田 皆人
,
向 篤志
,
海老 秀虎
,
島添 健次
,
田村 雄介
,
禹 ハンウル
,
Zhong Zhihong
,
Agus Nurrachman
,
高橋 浩之
,
淺間 一
,
上ノ町 水紀
,
石田 文彦
,
高田 英治
,
河原林 順
,
土屋 兼一
,
田辺 鴻典
,
鎌田 圭
,
富田 英生
«
»
引用
×