交通参加者の移動予測
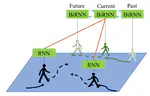
我々の生活環境では、歩行者や自動車、自転車や車椅子など様々な移動体が混在しています。さらに近年では、電動キックボードや自動運転車など新たな移動体が次々と登場しており、これらが混在する交通において安全性と円滑性を両立することが必要不可欠です。当研究室では、人間の意図や注意、周辺他者や環境が与える影響を考慮した歩行者や人間が操縦する様々な移動体の移動予測手法についての研究を行なっています。
我々の生活環境では、歩行者や自動車、自転車や車椅子など様々な移動体が混在しています。さらに近年では、電動キックボードや自動運転車など新たな移動体が次々と登場しており、これらが混在する交通において安全性と円滑性を両立することが必要不可欠です。当研究室では、人間の意図や注意、周辺他者や環境が与える影響を考慮した歩行者や人間が操縦する様々な移動体の移動予測手法についての研究を行なっています。