TAMURA Lab
TAMURA Lab
About
News
People
Research
Publications
Awards
Lecture
Contact
Pedestrian
歩行者が車両に道を譲る可能性の推定と軌道予測への利用
歩行者が車両に道を譲る可能性の推定と軌道予測への利用(第28回ロボティクスシンポジア) by @tamlab
Soichiro Tanno
,
Yusuke Tamura
,
Yasuhisa Hirata
歩行者と車の相互作用を考慮するアテンションモデルによる軌道予測
Soichiro Tanno
,
Yusuke Tamura
,
Akira Omuro
,
Taro Iwamoto
,
Takashi Sugano
,
Yasuhisa Hirata
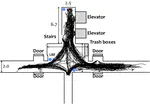
Behavior prediction of traffic participants
We are conducting research on behavior prediction of traffic participants for the safe coexisting of humans, robots, and autonomous vehicles.
Ayumi Kawasumi
,
Soichiro Tanno
,
Shunya Tadano
,
Hendrikus Hansen Witarsa
,
Yuuki Naganuma
,
Yusuke Tamura
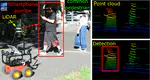
Detection of smartphone zombies
We are developing methods to detect smartphone zombies by using a LiDAR and a camera.
Ayumi Kawasumi
,
Yusuke Tamura
動的環境下における歩行者流を利用した移動ロボットナビゲーション
Wataru Kumahara
,
Gakuto Masuyama
,
Yusuke Tamura
,
Atsushi Yamashita
,
Hajime Asama
局所経路情報と歩行者流情報を用いた移動ロボットナビゲーション手法
Wataru Kumahara
,
Gakuto Masuyama
,
Yusuke Tamura
,
Atsushi Yamashita
,
Hajime Asama
環境に応じた人間の移動予測に基づく移動ロボットの人物回避
Yusuke Tamura
,
Shunsuke Hamasaki
,
Atsushi Yamashita
,
Hajime Asama
Modelling Behaviour Patterns of Pedesrians for Mobile Robot Trajectory Generation
Yusuke Tamura
,
Yoshitaka Terada
,
Atsushi Yamashita
,
Hajime Asama
サービスロボット:人間・ロボット共存環境におけるサービスロボットの振る舞い
Yusuke Tamura
,
Hajime Asama
«
Cite
×