TAMURA Lab
TAMURA Lab
About
News
People
Research
Publications
Awards
Lecture
Contact
English
日本語
1
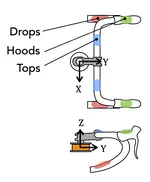
Estimation of Handgrip Position Based on Force Measurement During Steady Pedaling
Estimation of Handgrip Position Based on Force Measurement During Steady Pedaling (World Congress of Cycling Science 2015) by @tamlab
Yusuke Tamura
,
Kojiro Matsushita
,
Hisashi Osumi
シルバーカーのための段差乗り越え機構の開発
Fumiya Tsunoda
,
Mizuki Tanada
,
Manabu Ono
,
Yusuke Tamura
,
Hisashi Osumi
ロボットの姿勢が人間の注意の領域に与える影響を考慮したロボットの姿勢と注意の誘導のモデル化
Takafumi Akashi
,
Yusuke Tamura
,
Hisashi Osumi
受動関節機構を用いた3台の全方向移動マニピュレータの協調搬送制御
Ryo Ohta
,
Kazuki Morita
,
Yusuke Tamura
,
Hisashi Osumi
四脚歩行ロボットの最速歩行における状態遷移軌道の設計
Masafumi Iwata
,
Yuhei Suzuki
,
Yusuke Tamura
,
Hisashi Osumi
移動障害物を考慮した天井走行クレーンの経路計画
Masaki Negishi
,
Ryutaro Nakamura
,
Yusuke Tamura
,
Hisashi Osumi
自転車ペダリング動作時の姿勢解析のための6軸力覚センサを用いた荷重計測システムの開発
Hideaki Motoya
,
Yusuke Tamura
,
Hisashi Osumi
Optimal Grasping Poses of Manipulators for Cooperative Manipulation with Passive Joints
Ryo Ohta
,
Hisashi Osumi
,
Yusuke Tamura
協調ハンドリング時における物体の把持点探索手法
Kazuki Morita
,
Ryo Ohta
,
Hisashi Osumi
,
Yusuke Tamura
荷重計測に基づいた自転車乗車時のハンドル把持位置の推定
Yusuke Tamura
,
Kojiro Matsushita
,
Hisashi Osumi
«
»
Cite
×