概要
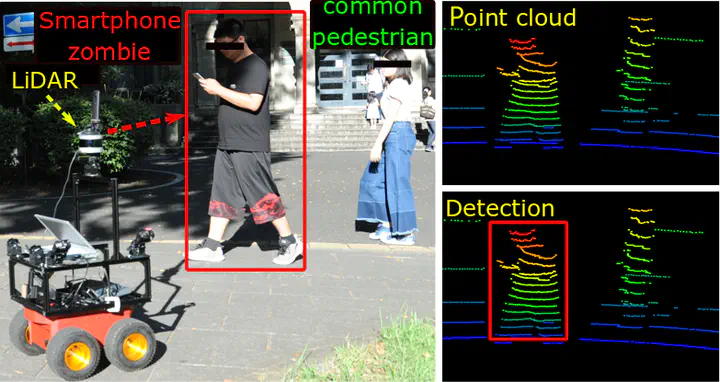
Awareness of surrounding and prediction of dangerous situations is essential for autonomous mobile robots, especially during navigation in a human-populated environment. To cope with safety issues, state-of-the-art works have focused on pedestrian detection, tracking, and trajectory prediction. However, only a few studies have been conducted on recognizing some specific types of dangerous behaviors exhibited by pedestrians. Here, we propose a tracking enhanced detection method to recognize people using their smartphones while walking, referred to as smartphone zombie. Features used for pedestrian detection usually involve the rotation variance problem, and in this paper, the drawback is handled by employing motion information from multi-object tracking. The proposed solution has been validated through experiments performed on a newly collected dataset. Results showed that our detector can learn a distinct pattern of the appearance of smartphone zombies. Thus, it can successfully detect them outperforming the existed detection method.